| Pré. | Proc. |
Paramétriques Diagramme Dynamique
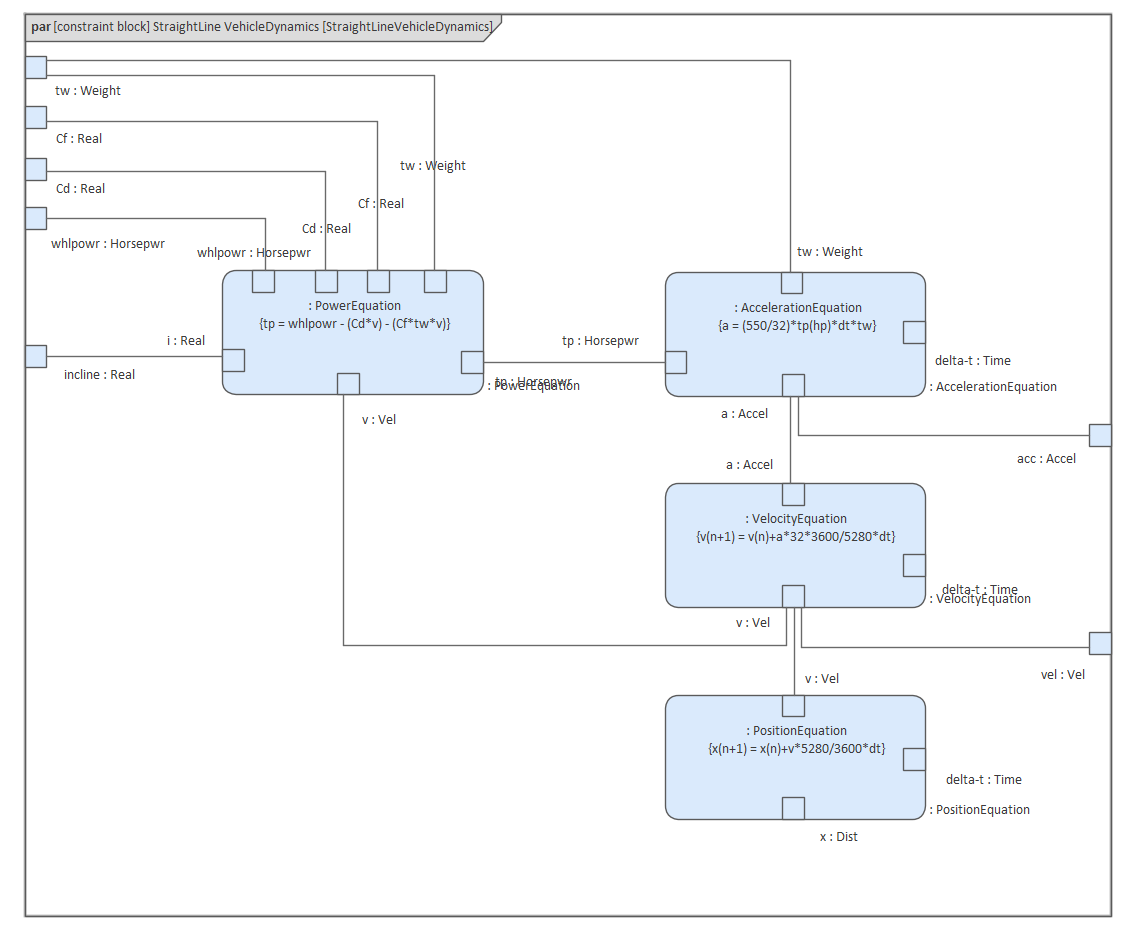
Dans ce diagramme Paramétriques , le Bloc de contraintes - Dynamique des véhicules en ligne droite - de l'exemple précédent a été développé pour montrer comment il peut être modélisé avec un certain nombre de propriétés de contraintes. La contrainte Straight Line Vehicle Dynamics est représentée par le cadre du diagramme et les équations constitutives qui contribuent à l'équation globale sont modélisées dans le diagramme en tant que propriétés de contrainte. Chaque contrainte sur laquelle les propriétés de contrainte sont basées a une équation de contrainte définie, qui est indiquée entre accolades {} sur le diagramme ; par exemple, l'équation d'accélération est définie dans le Bloc de contraintes comme {a = (550/32)*tp(hp)*dt*tw}. Les connecteurs de liaison sont utilisés pour relier les paramètres (variables) d'une équation aux paramètres (variables) d'une autre équation.